




Yekbûna kamerayê û LiDAR ji bo tespîtkirina rast
Di demên dawî de, tîmek zanistî ya Japonî rêbazek bêhempa pêşxistiye.kamera LiDARsensora fusionê, ku yekem LiDAR-a cîhanê ye ku meqsûnên optîkî yên kamerayekê û LiDAR-ê di yek sensorê de li hev dike. Ev sêwirana bêhempa dihêle ku daneyên pêvekirî yên bê paralaks di wextê rast de werin berhev kirin. Tîrbûna tîrêjên lazerê ya wê ji hemî sensorên radara lazerê yên cîhanê bilindtir e, ku tespîtkirina tiştên dûr û dirêj û rastbûna bilind gengaz dike.
Bi gelemperî, LiDAR bi kamerayan re tê bikar anîn da ku tiştan bi awayekî rasttir nas bike, lê di daneyên ku ji hêla yekîneyên cûda ve têne bidestxistin de newekheviyek heye, ku di encamê de di navbera sensoran de derengmayînên kalibrasyonê çêdibin. Sensora fusion a nû pêşkeftî kamerayê û LiDAR-a çareseriya bilind di yekîneyê de entegre dike, entegrekirina daneyên rast-dem bêyî paralaksê pêk tîne, û encamên bikêr û rast peyda dike.
Yekkirina kamerayê û LiDARê naskirina tiştan bi awayekî rast pêk tîne. Tîm teknolojiya sêwirana optîkî ya bêhempa bikar tîne da ku kamerayê û LiDARê di yekîneyekê de bi eksena optîkî ya hevrêzkirî entegre bike, ku entegrekirina daneyên wêneya kamerayê û daneyên dûrbûna LiDARê di wextê rast de gengaz dike, û naskirina tiştan a herî pêşketî heta niha pêk tîne.radara lazerDigel çareseriya pir bilind û sensora fusion a bi dendika herî bilind a belavbûna lazerê ya cîhanê dendika tîrêjên lazerê yên derketî zêde kiriye, ku dikare astengiyên piçûk li dûrên dirêj tespît bike, bi vî rengî çareserî û rastbûn baştir bike. Sensora wî ya nûjen dendika tîrêjê ya 0.045 pileyan heye û teknolojiya yekîneya şopandina lazerê ya taybet ji çapkerên pirfonksiyonel (MFP) û çapkeran bikar tîne da ku tiştên ku heta 30 santîmetreyan dikevin û li dûriya 100 metreyan tespît bike.
Radara lazer a neynika MEMS a domdar û xwedî taybetmendiyê ji bo tîrêjkirinê neynik an motorên MEMS hewce dike.lazerli ser qadeke fireh û bi dendika bilind. Lêbelê, çareseriya neynikên MEMS bi gelemperî kêm e, û motor pir caran zû diqede. Ev sensora nû ya entegre ji pergalên li ser bingeha motorê çareseriyek bilindtir û ji neynikên MEMS ên kevneşopî domdariyek mezintir peyda dike. Zanyar ji bo pêşxistina neynikên MEMS ên taybet, teknolojiya pakkirina seramîk û teknolojiya şopandina lazer a çareseriya bilind, neynikên MEMS ên taybet pêş dixin da ku piştgiriyê bidin hesasiyeta rastbûna bilind di pîşesaziyên cûrbecûr de wekî wesayîta xweser, keştî, makîneyên giran, hwd.
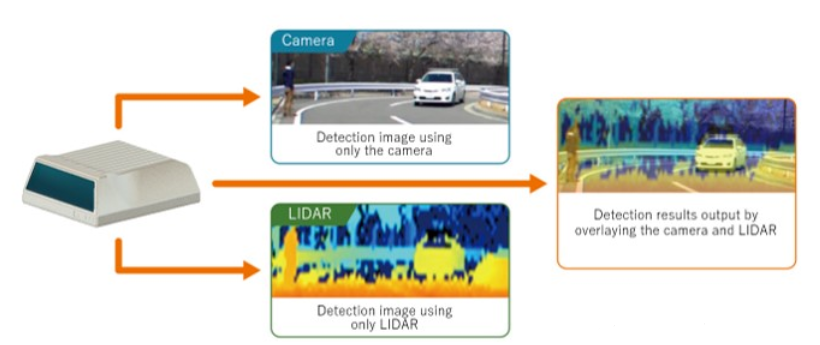
FIG1: Wêne ji hêla sensora fusion a LiDAR-ê ya kamerayê ve hatî tesbît kirin
Dema şandinê: 10ê Sibatê 2025